

Cómo montar un escornabot DIY sin morir en el intento
Estos son los pasos a seguir para montar tu pequeñín sin mucho sufrimiento 🙂
Tienes un repositorio con toda la información necesaria en GitHub pero mejor si establecemos un orden y vamos paso a paso.
Piezas impresas
Descarga todas las piezas aquí.
En el caso de no tener impresora 3D yo me encargo de eso, es parte del proyecto #PonUnEscornabotEnTuVida

Componentes electrónicos
Puedes consultar los componentes en la wiki del proyecto original
Te dejo un listado de los componentes que utilizo por si quieres buscarlos por tu cuenta 😛
Placa Botonera
La puedes fabricar artesanal 100% o pedir la PCB de @xdesig. Con independencia de la opción elegida vas a necesitar estos componentes para soldar:
- 5 pulsadores de 12x12x7,3 junto con el plástico superior de colores
- 5 resistencias 10K
- 1 resistencia 22K
- Pines acodados
*Recuerda, una vez montada tienes que comprobar y configurar las lecturas de la botonera
Componentes del Cuerpo
2 – Motores paso a paso 28BY J-48 con “placa” drive ULN2003
2 – Juntas tóricas de 63x60x3 (para las ruedas)
1 – Arduino Nano Atmega328 (También puedes usar un Arduino Pro-Mini)
1 – Zumbador o Buzzer de 5V
1 – Protoboard pequeña de 170 puntos
1 – Portapilas de cuatro unidades para pilas AA (no confundir con las AAA que son las finitas)
20 – Cables arduino macho-hembra (te van a sobrar pero más vale prevenir)
2 – Cables arduino macho-macho (para la conexión pilas-protoboard)
16 – Tornillos M3 (a mi me gustan con la punta para destornillador de estrella)
2 – Tuercas M3 (para las ruedas)
1 – Canica de 14mm (si te gustan las de la carita, busca “bola 14mm smile”)
Enlace a los componentes para comprarlos por tu cuenta y riesgo

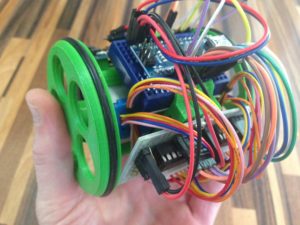
Montaje del cuerpo
Puedes consultar la guía de montaje paso a paso
También te sirve de ayuda si montas la versión Ogaki de abiertocc o la versión v2.12 de XDeSIG.
Cableado de los drivers, buzzer y portapilas
Ya tenemos todo colocado en su sitio, ahora hay que conectar los diferentes componentes con Arduino NANO. Para eso puedes seguir la guía de cableado
Instalación IDE Arduino y descarga de la programación
Si es la primera vez que utilizas Arduino lo mejor es consultar directamente en la web, instalar el software (IDE) de arduino.
Las diferentes programaciones las puedes encontrar en el repositorio de Rafa Couto en GitHub
Algunas cosas importantes que debes seleccionar antes de compilar y cargar la programación en tu arduino NANO:
- Selecciona la placa Arduino NANO (o la que uses)
- El procesador que usa (si es el 164 o 328)
- Puerto COM del PC al que lo tienes conectado
Comprobación de la botonera
Ya lo he comentado antes, pero este paso se suele olvidar y es uno de los que más quebraderos de cabeza causa. Yo hago la comprobación una vez montado el robot entero, pero tu puedes hacerlo cuando quieras.
Comprobación y configuración de las lecturas de la botonera
Anota los valores de cada botón para editarlos en el archivo configuration.h
A corretear 🙂
Si todo ha ido bien, el pequeñajo tiene que empezar a caminar. Cuando te familiarices un poco con Arduino puedes probar a tocar la programación, cambiar los giros, la velocidad, los sonidos del buzzer, añadir sensores, ponerle bluethoot, wifi y todo lo que se te ocurra.



 Twitter
Twitter
 Facebook
Facebook
 Youtube
Youtube
 Instagram
Instagram
Dejar un comentario
¿Quieres unirte a la conversación?Siéntete libre de contribuir